3.3 é}ā”╬’┴„ŽĄĮyŅü╔½║═Ģrą“Į©─Ż
ė╔RPNs─Żą═ąį┘|║═ūā▀węÄät,┐╔═Ų│÷╬’┴„įOéõķgžø╬’▀\▌öĄ─▒žę¬Śl╝■:į┤įOéõ╔Žėąžø,─┐Ą─įOéõ╔Ž¤ožøĪŻĄ½āH┤╦▀Ć▓╗─▄│õĘų├Ķ╩÷ūā▀w╩┬╝■░l╔·Ą─│õĘųŚl╝■ĪŻ└²╚ń,▒Ŗ╦∙ų▄ų¬Ą─Ī░╦└µiĪ▒║═Ī░Ž▌┌ÕĪ▒¼FŽ¾╩Ūė╔PetriŠWųąĪ░Ęųų¦Ī▒║═Ī░Ģ■║ŽĪ▒ā╔ĘNø_═╗ĻPŽĄįņ│╔Ą─(╚ńłD4),╦³éāį┌ŠWĮjųą╣▓ŽĒ▌ö│÷║═▌ö╚ļ┘Yį┤Äņ╦∙,ī”ūā▀wĄ─░l╔·ėąų°ć└Ė±Ž▐ųŲŚl╝■ĪŻ×ķ┤╦,▒Š╬─į┌RPNsųąę²╚ļŅü╔½║═Ģrą“į¬╦žĪŻ

łD4 PetriŠWø_═╗ĻPŽĄ
Č©┴x4ĪĪę╗éĆų°╔½┘Yį┤PetriŠW(Colored Retrsource PetriNets,CRPNs)▒Ē╩Š×ķę╗éĆ┴∙į¬ĮMN=(P,T,C,I,O,M0)ĪŻŲõųąC╩ŪÄņ╦∙║═ūā▀wĄ─Ņü╔½╝»:C(pi)={ai1,ai2,?,aim-1,aim},i=1,2,?,m×ķŅü╔½öĄ;C(tj)={bj1,bj2,?,bjn-1,bjn},j=1,2,?,n×ķŅü╔½öĄ;I:C(p)Ī┴C(t)Ī·N(ĘŪžōš¹öĄ)×ķ▌ö╚ļė│╔õ,╚ĪŅü╔½aihĢrĄ─piĄĮ╚ĪŅü╔½bjkĢrĄ─tjĄ─▌ö╚ļ▀BĮėöĄėø×ķI(aih,bjk);O:C(t)Ī┴C(p)Ī·N(ĘŪžōš¹öĄ)×ķ▌ö│÷ė│╔õ,╚ĪŅü╔½bjkĢrĄ─tjĄĮ╚ĪŅü╔½aihĢrĄ─piĄ─▌ö│÷▀BĮėöĄėø×ķO(bjk,aih)ĪŻ
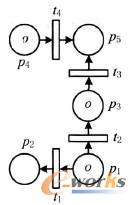
į┌CRPNs─Żą═ųą,Ė∙ō■├┐éĆś╦ėøĄ──┐Ą─ī┘ąį┘xėĶŲõŽÓæ¬Ą─Ņü╔½Map(M,C),üĒęÄČ©╦³ģó┼cŽÓæ¬Ņü╔½Ą─ūā▀w,▓óĮøÜvŽÓæ¬Ņü╔½Ą─Äņ╦∙,ūŅĮKĄĮ▀_─┐Ą─Äņ╦∙ĪŻ└²╚ń:łD2ųą,▓╗Ę┴┴ŅC(p2)={a1,a2},C(t2)={a1},C(t4)={a2},C(p7)={a3,a4},C(t10)={a3},C(t9)={a4},«öÄņ╦∙p2Ą─ś╦ėøŅü╔½×ķa1Ģr(Map(Mp2,C)=a1),Ņü╔½×ķa1Ą─ūā▀wt2┐╔░l╔·(C(t2)=a1),ätĘQūā▀wt2╩ŪŅü╔½a1╩╣─▄Ą─ĪŻ╚ń╣¹Äņ╦∙p2Ą─ś╦ėøŅü╔½×ķa2Ģr(Map(Mp2,C)=a2),Ņü╔½×ķa2Ą─ūā▀wt4┐╔░l╔·ĪŻ▀@Š═ĮŌøQ┴╦łD1ųąžø╬’į┌▌ö╦═ÖC2║═6╔ŽĄ─Ęų▓µ▀\▌öå¢Ņ}ĪŻ
Č©┴x5ĪĪę╗éĆĢrą“ų°╔½┘Yį┤PetriŠW(Timed Colored Resource PetriNets,TCRPNs)▒Ē╩Š×ķę╗éĆŲ▀į¬ĮMN=(P,T,C,I,O,D,M0)ĪŻŲõųą:D={di,i=1,2,?,n}:PĪ·N(īŹöĄ),×ķÄņ╦∙Ą─Ģrķg╝»║Ž(di×ķpiĄ─Ģrčė)ĪŻ×ķ├┐ę╗Äņ╦∙ę²╚ļę╗Ģrčė,┤·▒Ēūā▀w╩┬╝■░l╔·ĮøÜvĄ─Ģrķg║¾«a╔·ą┬Ą─ĀŅæB╦∙ąĶꬥ─ĢrķgĪŻ
ęÄČ©ś╦ėø╣żū„ĢrķgĄ╚ė┌Ųõ«a╔·Ģrķg╝ė╔ŽŲõ╦∙į┌Äņ╦∙Ą─ĢrčėĪŻ╚ń╣¹ā╔éĆ▌ö╚ļÄņ╦∙Č╝Š▀ėąś╦ėø,─▄╩╣ūā▀w░l╔·üĒĖéĀÄ╣▓ŽĒĄ─▌ö│÷Äņ╦∙,ät▌^įń╣żū„ĢrķgĄ─ś╦ėøėąā׎╚ÖÓ,╝┤Ž╚╚ļŽ╚│÷(First-In First-Out,FIFO)ęÄätĪŻ└²╚ń:╝┘įOłD2ųąd4=3,d5=15,t4║═t5═¼Ģr░l╔·,╝┤į┌łD1ųą═¼Ģrėąžø╬’Token1║═žø╬’Token2ĘųäeÅ─▌ö╦═ÖC2Ī·▌ö╦═ÖC4║═ČčČŌÖC1Ī·▌ö╦═ÖC5,žø╬’ś╦ėøŽ╚ĄĮ▌ö╦═ÖC2,žø╬’ś╦ėø2║¾ĄĮ▌ö╦═ÖC5,ś╦ėø1Ą─╣żū„Ģrķgįńė┌ś╦ėø1Ą─╣żū„Ģrķg,ätžø╬’ś╦ėø1ā׎╚░l╔·ūā▀w,t7ā׎╚ė┌t5░l╔·ĪŻ▀@Š═ĮŌøQ┴╦łD1ųąžø╬’į┌▌ö╦═ÖC4║═5╔ŽĄ─Ģ■║Ž▀\▌öå¢Ņ}ĪŻ
3.4é}ā”╬’┴„ŽĄĮyą┼╠¢Į©─Ż
×ķ▒Ńė┌įOėŗ╬’┴„┐žųŲŽĄĮy,▒Š╬─╩╣ė├┴╦╩┬╝■T║═Śl╝■I/Oā╔éĆĖ┼─Ņ:╩┬╝■╩ŪŽĄĮyųą╦∙░l╔·Ą─äėū„,╝┤žø╬’į┌é}ā”įOéõķgĄ─é„▀f;Śl╝■╩ŪŽĄĮyĀŅæBĄ─ī┘ąį╗“▀ē▌ŗ├Ķ╩÷,╝┤é}ā”įOéõĄ─ĀŅæBĪŻę╗éĆ╩┬╝■Ą─░l╔·┐╔─▄ąĶę¬ÄūéĆŚl╝■═¼Ģr│╔┴ó,▀@ą®Śl╝■ĘQ×ķ╩┬╝■Ą─Ū░╠ߌl╝■,╩┬╝■░l╔·║¾┐╔─▄ę²ŲŚl╝■Ą─ūā╗»,▓ó«a╔·ę╗ą®Ųõ╦¹Śl╝■,║¾š▀ĘQ×ķ╩┬╝■Ą─║¾╣¹(║¾└^Śl╝■)ĪŻ▒Š╬─ą┼╠¢Į©─ŻįOėŗ▓╗═¼ė┌╬─½I[15]ų«╠Äį┌ė┌:ó┘ūā▀w╩┬╝■Ą─░l╔·Śl╝■I║═║¾╣¹OĘųäe▒Ē╩Šé}ā”ŽĄĮyųąĄ─▌ö╚ļé„ĖąŲ„ą┼╠¢║═▌ö│÷┐žųŲŲ„ą┼╠¢,─┐Ą─╩Ū═©▀^ūx╚ļé„ĖąŲ„Ą─ĀŅæB,▓óīóĖ³ą┬Ą─║¾╣¹ĀŅæB░l╦═ĄĮ┐žųŲŲ„,üĒ┐žųŲé}ā”ŽĄĮy▀\ąą;ó┌▓╔ė├ŠC║Žą┼╠¢ĪóĢrą“ĪóŅü╔½Īó┘Yį┤ą┼ŽóĄ─PetriŠW─Żą═STCRPNs,ęįĘĮ▒ŃįOėŗ╔·│╔╠▌ą╬łDą╬╩ĮĄ─PLC┐žųŲ│╠ą“ĪŻ
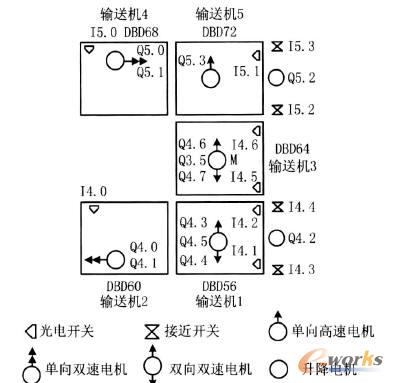
łD5 īŹ└²ųąĄ─žø╬’▀\▌ö╩ŠęŌłD
Č©┴x6 ę╗éĆSTCRPNs▒Ē╩Š×ķę╗éĆŠ┼į¬ĮMN=(P,T,I,O,M0,C,D,X,Y)ĪŻŲõųą:X╩Ū▌ö╚ļą┼╠¢Ą─▓╝Ā¢ŅÉą═║»öĄ,«ö╩┬╝■ūā▀wĄ─┘Yį┤╩╣─▄(▀BĮėūā▀wĄ─Ū░Äņ╦∙ōĒėąś╦ėø,║¾Äņ╦∙¤oś╦ėø)ĪóŅü╔½╩╣─▄║═Ģrķg╩╣─▄Śl╝■×ķšµĢr,į┘┼ąöÓ▌ö╚ļ╬’└Ēą┼╠¢╩Ūʱ×ķšµ,╚ń╣¹×ķšµät║»öĄ▌ö│÷×ķšµ,▒Ē├„ūā▀w┐╔┴ó╝┤░l╔·;Y╩Ū▌ö│÷ą┼╠¢║»öĄ,┐╔═©▀^PLC┤·┤ał╠ąą╬’└Ēą┼╠¢▌ö│÷ĪŻ
łD6 īŹ└²ī”æ¬Ą─PetriŠW─Żą═
į┌STCRPNs─Żą═ųą,╦∙ėąūā▀wČ╝─▄ē“═¼Ģr▓󹹥ž░l╔·,▓óŪęį┌ę╗Č©▌ö╚ļą┼╠¢Śl╝■Ž┬,┤╦▀^│╠▀B└m▓╗öÓ,ų▒ų┴ø]ėąĘ¹║Ž░l╔·Śl╝■Ą─ūā▀w×ķų╣ĪŻĄ½į┌PLC│╠ą“Ą─īŹļHł╠ąąųą,▀@ę╗▀^│╠ėą╦∙▓╗═¼:╩┬╝■ūā▀w╩ŪęįÆ▀├Ķ裣hĘĮ╩Įį┌ę╗éĆéĆÆ▀├Ķų▄Ų┌ā╚Ēśą“ł╠ąą,╝┤į┌├┐ę╗┤╬裣hÆ▀├Ķųą,╦∙ėą▌ö╚ļą┼╠¢║»öĄ║═▌ö│÷ą┼╠¢║»öĄŠ∙▒╗┼ąČ©║═ł╠ąą,╩╣ūā▀wĄ├ęį░l╔·ĪŻÅ─STCRPNs─Żą═ĄĮŲõī”æ¬PLC┐žųŲ│╠ą“Ą─įOėŗ▀^│╠īóį┌Ž┬ę╗š┬ųąėæšōĪŻ

łD7 ė│╔õĄ─PLC╠▌ą╬łD│╠ą“
4 ╗∙ė┌STCRPNsĄ─é}ā”╬’┴„┐žųŲŽĄĮyįOėŗ
į┌╣ż│╠įOėŗ╔ŽĄ─═©ė├ąį║═┘|┴┐ą¦┬╩ų«ķg╚Īš█ųį,╬─ųą╠ß│÷┴╦ę╗ĘNą┬Ą─į¬╦žī”æ¬ė│╔õĘĮĘ©,▀mė├ė┌īóSTCRPNs─Żą═ė│╔õ╔·│╔×ķ┼cŲõŽÓæ¬Ą─PLC┐žųŲ│╠ą“ĪŻ¼FęįīŹļH╣ż│╠æ¬ė├(ŪÓŹu░─┐┬¼ö┐šš{Ų„ÅSAS/RS) ųąĄ─ę╗éĆ▌ö╦═ÖC┐žųŲīŹ└²üĒšf├„ė│╔õ▐D╗»▀^│╠,╚ńłD5Ī½łD7 ╦∙╩ŠĪŻŲõųą,łD5 ×ķAS/ RS ╣ż│╠įOėŗłDĄ─ę╗▓┐Ęų,░³└©▌ö╦═ÖCįOéõ1 ,2 , ?,5 ,é„ĖąŲ„▌ö╚ļI4.0 ,I4.1 , ?, I5.3 ,┐žųŲļŖÖC▌ö│÷Q4.0 ,Q4.1,?,Q5.3Ą╚,╬’┴„▌ö╦═┬ĘÅĮ×ķ▌ö╦═ÖC1Ī·▌ö╦═ÖC3Ī·▌ö╦═ÖC5,▌ö╦═ÖC1Ī·▌ö╦═ÖC2,▌ö╦═ÖC4Ī·▌ö╦═ÖC5,łD6║═łD7Ęųäe×ķī”æ¬Ą─STCRPNs─Żą═║═▓┐ĘųPLC╠▌ą╬łD┐žųŲ│╠ą“ĪŻ▒ŠīŹ└²ųą▓╔ė├┴╦╬„ķTūėĄ─PLC┐žųŲŲ„S72400,į┌Ųõ│╠ą“įOėŗ╣żŠ▀STEP7ųą░³└©╚²ŅÉ╬─╝■:│╠ą“╬─╝■(ĮM┐ŚēKOB║═╣”─▄ēKFC)ĪóöĄō■╬─╝■(öĄō■ēKDB║═┤µā”Ų„M)║═Ųõ╦¹ŽÓĻP╬─╝■(╚ńė│╔õ╬─╝■Īó┼RĢrūā┴┐Īó┼õų├╬─╝■Ą╚,Ųõ╦¹ŅÉą═PLCĄ─│╠ą“ųąę╗░Ńę▓░³║¼▀@╚²ŅÉ╬─╝■)ĪŻ╬─ųąĘĮĘ©Ą─╗∙▒ŠįŁ└ĒŠ═╩ŪīóŽĄĮySTCRPNs─Żą═ųąĄ─Ė„ĘNį¬╦žĘųäeė│╔õĄĮPLCųąĄ─ī”æ¬ĮM│╔╬─╝■ųąĪŻ
į┌ŽĄĮySTCRPNsĮ©─Ż▀^│╠ųą,īó╣ż│╠įOėŗłDųąĄ─▌ö╦═ÖCįOéõĮ©─Ż▒Ē╩Š×ķÄņ╦∙┘Yį┤:▌ö╦═ÖC1Ī·p1,▌ö╦═ÖC2Ī·p2,?,▌ö╦═ÖC5Ī·p5;į┌ŽĄĮy┐žųŲ│╠ą“įOėŗųą,īó─Żą═ųąĄ─Äņ╦∙ė│╔õ×ķPLC╣żū„┤µā”Ų„ųąĄ─ę╗Č╬öĄō■ģ^,╝┤į┌öĄō■ēKDBųąäōĮ©ę╗éĆDWORD(2éĆūų,4éĆūų╣Ø,32╬╗)ĮYśŗ▒Ē╩ŠĪŻ└²╚ń:łD5ųąDB100.DBD56▒Ē╩ŠöĄō■ēKDB100ųą,Å─56Ī½59ūų╣Ø┤·▒ĒÄņ╦∙p1(▌ö╦═ÖC1);DB100.DBD60▒Ē╩ŠöĄō■ēKDB100ųą,Å─60Ī½63ūų╣Ø┤·▒ĒÄņ╦∙p2(▌ö╦═ÖC2),...,ęį┤╦ŅÉ═ŲĪŻöĄō■ģ^Ą─ĄžųĘ╬©ę╗ś╦ūR┴╦─Żą═ųąÄņ╦∙┘Yį┤Ą─įOéõ╠¢,Č°öĄō■ģ^ā╚Ą─öĄō■ą┼Žó├Ķ╩÷┴╦─Żą═ųąÄņ╦∙Ą─Ņü╔½ĪóĢrą“ī┘ąį╝░ŲõųąĄ─ś╦ėøĄ╚ą┼Žó,╚ń▒Ē2╦∙╩ŠĪŻŅÉ╦ŲĄž,─Żą═ųąĄ─žø╬’ś╦ėøė│╔õ▐D╗»×ķę╗éĆWORD(1éĆūų,2éĆūų╣Ø,16╬╗)Ą─öĄō■ĮYśŗ,ĘQų«×ķžøå╬,įōžøå╬ė╔╔Žīėš{Č╚ŽĄĮyŽ┬▀_,░³║¼┴╦žø╬’Ą─▀\▌ö┬ĘÅĮą┼Žó,▓ó┼cé}ā”öĄō■ÄņŽĄĮy│÷╚ļÄņ├³┴Ņę╗ę╗ī”æ¬,┐╔┤µĘ┼į┌Äņ╦∙öĄō■ģ^ā╚ĪŻžø╬’ś╦ėøį┌é}ā”įOéõķgĄ─▀\▌ö,Š═▒Ē¼F×ķžøå╬į┌PLC┤µā”Ų„öĄō■ģ^ųąĄ─é„▀fĪŻžøå╬Ą─╚╬äš╠¢į┌š¹éĆŽĄĮyųą╬©ę╗,į┌é„╦═▀^│╠▓╗ūā,Ūę▒Ż┤µį┌öĄō■ēKųą,╝┤╩╣ŽĄĮyĄ¶ļŖę▓▓╗Ģ■üG╩¦,Å─Č°▒ŻūC┴╦é}ā”╬’┴„ą┼ŽóĄ─£╩┤_ąįĪŻ

▒Ē2 Äņ╦∙öĄō■ģ^ĮYśŗ
─Żą═ųąĄ─ūā▀wė│╔õ×ķPLC│╠ą“╬─╝■ųąĄ─é„▀f║»öĄFC,═Ļ│╔žøå╬į┌Äņ╦∙öĄō■ģ^ų«ķgé„▀fĄ─╣”─▄ĪŻ═¼└Ē,─Żą═ųąĄ─ą┼╠¢ė│╔õ×ķPLCĄ─ŽÓĻP╬─╝■,╠Ä└ĒPLCĄ─öĄūų▌ö╚ļ║═öĄūų▌ö│÷,╚ń╣ŌļŖķ_ĻPĪóĮėĮ³ķ_ĻPĄ╚é„ĖąŲ„ą┼╠¢,ęį╝░┐žųŲļŖÖC▀\ąąĄ─ł╠ąąį¬╝■ĪŻūā▀wé„▀f╣”─▄║»öĄ╩Ū┐žųŲŽĄĮy▀\ąąĄ─ĻPµIĪŻį┌PetriŠWųą,ūā▀w═©▀^▌ö╚ļ╗Ī║═▌ö│÷╗Ī▀BĮėŪ░║¾ā╔éĆÄņ╦∙┘Yį┤;į┌PLCųą,ī”æ¬Ą─é„▀f║»öĄFCĖ∙ō■▌ö╚ļŚl╝■ą┼╠¢║═ūā▀węÄätī”░l╦═ĘĮ║═Įė╩šĘĮā╔éĆöĄō■ģ^▀Mąą▓┘ū„,▓ó▌ö│÷┐žųŲą┼╠¢ĪŻ▓╗═¼ŅÉą═Ą─ūā▀wė│╔õ×ķ▓╗═¼Ą─žøå╬é„▀f║»öĄĪŻ╚ńłD7╦∙╩Š,ęį─│▌ö╦═ÖCūā▀wé„▀f╣”─▄║»öĄFC10×ķ└²,▒Ē3╩Ū║»öĄ▌ö╚ļ▌ö│÷ģóöĄ,Ųõūā▀węÄät┐žųŲ┴„│╠Ęų×ķęįŽ┬╦─éĆ▓Į¾E:
(1)īó░l╦═ĘĮžøå╬Dword0┼c│ŻöĄDW#16#8FFFŽÓ┼c,Ų┴▒╬Ė▀╬╗,ĮY╣¹┤µ╚ļLD10,īóLD10┼c│ŻöĄ┴ŃL#0▒╚▌^,╚¶▓╗ŽÓĄ╚ät▒Ē├„░l╦═ĘĮėąžøå╬,Oc2cupy0▌ö│÷×ķ1,ʱät▌ö│÷×ķ0,▒Ē╩Šø]ėąžøå╬ĪŻ═¼└Ē,īóĮė╩šĘĮĄ─žøå╬Dword1┼c│ŻöĄDW#16#8FFFŽÓ┼c,Ų┴▒╬Ė▀╬╗,╚¶ĮY╣¹▓╗×ķ┴Ńät▒Ē├„Įė╩šĘĮėąžøå╬,Occupy1▌ö│÷×ķ1,ʱät▌ö│÷×ķ0,▒Ē╩Šø]ėąžøå╬ĪŻ
(2)╚ń╣¹░l╦═ĘĮėąžøå╬,Įė╩šĘĮø]ėąžøå╬,Ūę░l╦═Śl╝■│╔┴ó,ätīó░l╦═ĘĮžøå╬╦═ĮoĮė╩šĘĮ,╝┤Dword0Ą─ā╚╚▌īæ╚ļDword1ĪŻ
(3)╚ń╣¹░l╦═ĘĮ║═Įė╩šĘĮČ╝ėąžøå╬,Ūęā╔Åłžøå╬ŽÓ═¼,▒Ē├„žø╬’(žøå╬)╠Äė┌░l╦═▀^│╠ųą,īóé„╦═ś╦ųŠSentų├×ķ1,ʱät×ķ0ĪŻ╚ń╣¹Įė╩šĘĮžø╬’╩šĄĮś╦ųŠReceived×ķ1,ätīó░l╦═ĘĮžøå╬ŪÕ┴ŃĪŻį┌░l╦═▀^│╠ųą,īóDword1╦═LD18,├┐Įø▀^ę╗éĆĢrķgå╬╬╗,īóDword1Ą─ā╚╚▌╝ėL#1048576,╝┤į┌žøå╬Ą─░l╦═ĢrķgėŗöĄ╔Ž╝ė1ĪŻ╚¶░l╦═Ģrķg┤¾ė┌ąĶę¬£p╦┘Ģrķg,ś╦ųŠSlowų├×ķ1,▀M╚ļ┬²╦┘▀\▌öĀŅæBĪŻ
(4)╚ń╣¹Įė╩šą┼╠¢×ķšµ,ät░l╦═▀^│╠ĮY╩°,░l╦═ĘĮųąĄ─žøå╬ŪÕ┐šĪŻ

▒Ē3 ūā▀wé„▀f╣”─▄║»öĄģóöĄ
į┌łD5ųą,ūā▀wé„▀f║»öĄFC10īóžø╬’Å─▌ö╦═ÖC3(DBD64)▀\╦═ĄĮ▌ö╦═ÖC5(DBD72),ī”æ¬łD6Ą─PetriŠW─Żą═,▐DōQ×ķPLCĄ─╠▌ą╬łD┐žųŲ│╠ą“(╚ńłD7)ĪŻ─Żą═ė│╔õĻPŽĄ×ķ:p3Ī·DBD64,p5Ī·DBD72,t3Ī·FC10(DBD64Ī·DBD72),XĪ·I4.6,YĪ·Ż©Q4.6,Q3.5,Q5.3Ż®ĪŻ«öžø╬’═Ļ╚½╠Äė┌▌ö╦═ÖC3(DBD64)╔ŽĢr,žø╬’═ą▒Pš┌ūĪ╣ŌļŖ╣▄I4.6ĪŻ╚ń╣¹┤╦Ģr▌ö╦═ÖC5(DBD72)╠Äø]ėąžø╬’,╝┤DBD72ųąø]ėąžøå╬,ätžøå╬é„▀f║»öĄFC10Ą─▌ö╚ļŚl╝■│╔┴ó,ł╠ąąFC10īóDBD64ųąĄ─žøå╬╦═ĮoDBD72,▓óŪę▌ö│÷L0.0,L0.1,L0.2╚½▓┐×ķ1,┐žųŲļŖÖCM(Q315║═Q416▌ö│÷)Ė▀╦┘▐DäėĪŻ▀\▌ö▀^│╠ųą,├┐Ė¶0.5s,DBD72ųąĄ─ĢrķgėŗöĄ╝ė1ĪŻ«öžø╬’š┌ūĪ╣ŌļŖķ_ĻPI5.1Ģr,ł╠ąąFC10īóDBD64Ą─žøå╬ŪÕ┴Ń,žøå╬▀\╦══Ļ«ģ,┤╦ĢrL0.0=0,L0.1=1,L0.2=0,ļŖÖCM═Żų╣▐DäėĪŻÅ─łD7┐╔ęį┐┤│÷,▌ö╦═ÖC3(DBD64)Ą─ļŖÖCMĄ─▀\▐Dėąā╔ĘNŪķør:ó┘žø╬’Å─DBD64▌ö│÷ĄĮDBD72;ó┌žø╬’Å─DBD56▌ö╚ļĄĮDBD64ĪŻPLCį┌ł╠ąą│╠ą“Ģr,═¼ę╗éĆ▌ö│÷ŠĆ╚”┐é╩Ūęį│╠ą“ųąĄ─ūŅ║¾ę╗éĆ×ķ£╩,ę“┤╦×ķ▒▄├Ō│╠ą“╗ņüy,┐žųŲą┼╠¢▌ö│÷ŠĆ╚”ų╗─▄ė|░lę╗┤╬ĪŻī”ė┌DB64üĒšf,ūā▀wé„▀f║»öĄFC10░³└©Å─DB64ĄĮDBD72Ą─▌ö│÷╗Ī║═Å─DB56ĄĮDBD64Ą─▌ö╚ļ╗ĪĪŻ
5 ĮY╩°šZ
▒Š╬─╠ß│÷┴╦ę╗ĘN├µŽ“é}ā”╬’┴„Ą─STCRPNs,ė├ė┌ŽĄĮyĮ©─Ż╝░┐žųŲ│╠ą“įOėŗĪŻSTCRPNs─Żą═ėąęįŽ┬ÄūéĆ╠ž³c:ó┘╩Ūę╗ĘN├µŽ“é}ā”╬’┴„ŽĄĮyįOéõ┘Yį┤Ą─ų▒ė^Ą─PetriŠW─Żą═;ó┌ęūė┌╗»║åĪóĘų╬÷║═Ę┬šµ;ó█ų▒Įėė│╔õ▐D╗»×ķPLC╠▌ą╬łD┐žųŲ│╠ą“ĪŻ╬┤üĒ╣żū„╩ŪīóOOįOėŗ╝╝ągę²╚ļĄĮ┐žųŲŽĄĮyĮ©─Ż╝░įOėŗ▀^│╠ųą,═©▀^╝»│╔╗»Ą─┐žųŲ▄ø╝■ūįäėįOėŗ╣żŠ▀,╝ė╦┘┐╔“×ūCĄ─Ę¹║ŽIEC61131-3ś╦£╩Ą─╠▌ą╬łD│╠ą“╔·│╔;┴Ēę╗éĆ蹊┐ĘĮŽ“╩Ū╩╣ė├┐╔öUš╣ś╦ėøšZčį(eXten-sible Markup Language,XML)╝╝ągüĒØMūŃPetriŠW─Żą═ś╦£╩╗»ĪóĘŪ╣”─▄╗»Ą─ąĶŪ¾,ķ_░l═©ė├Ą─╬’┴„ŽĄĮy▌oų·įOėŗ╣żŠ▀ĪŻ
║╦ą─ĻPūóŻ║═ž▓ĮERPŽĄĮyŲĮ┼_╩ŪĖ▓╔w┴╦▒ŖČÓĄ─śIäšŅIė“ĪóąąśIæ¬ė├Ż¼╠N║Ł┴╦žSĖ╗Ą─ERP╣▄└Ē╦╝ŽļŻ¼╝»│╔┴╦ERP▄ø╝■śIäš╣▄└Ē└Ē─ŅŻ¼╣”─▄╔µ╝░╣®æ¬µ£Īó│╔▒ŠĪóųŲįņĪóCRMĪóHRĄ╚▒ŖČÓśIäšŅIė“Ą─╣▄└ĒŻ¼╚½├µ║Ł╔w┴╦Ų¾śIĻPūóERP╣▄└ĒŽĄĮyĄ─║╦ą─ŅIė“Ż¼╩Ū▒ŖČÓųąąĪŲ¾śIą┼Žó╗»Į©įO╩ū▀xĄ─ERP╣▄└Ē▄ø╝■ą┼┘ćŲĘ┼ŲĪŻ
▐D▌dšłūó├„│÷╠ÄŻ║═ž▓ĮERP┘YėŹŠWhttp://www.guhuozai8.cn/
▒Š╬─ś╦Ņ}Ż║├µŽ“é}ā”╬’┴„Ą─Į©─Ż╝░┐žųŲŽĄĮyįOėŗĘĮĘ©Ż©Ž┬Ż®
▒Š╬─ŠWųĘŻ║http://www.guhuozai8.cn/html/solutions/1401932730.html